
Embedded Control - Anytime Control Algorithms for Real-Time Embedded Systsems
A general tendency can be observed in embedded systems towards implementation of a great variety of concurrentreal-time tasks on the same platform, thus reducing theoverall HW cost and development time. Among such tasks, those implementing control algorithms are usually highly time critical, and have traditionally imposed very conservative scheduling approaches, whereby execution time is allottedstatically. With this approach, it is imperative for the designer to consider the worst case situation for the task computation times.The evident drawback is that the control designer cannot capitalize on the additional availability of resources when the system workload is low. Indeed, assuming that the RTOS guarantees a minimum time τmin for the execution of the control task, it is often the case that, formost of the CPU cycles, a time τ > τmin could be made available for control.
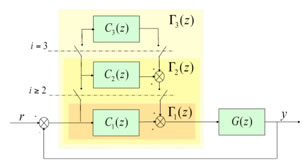
The problem of Anytime Control is to make good use of that extra time.The key idea is to design controllers which can be implemented so that a useful result is guaranteed whenever thealgorithm is run for at least tmin; however, better results canbe provided if longer times are allowed.
In our works we present a methodology for designing embedded controllers based on the any-time control paradigm. A control law is split into a sequence of subroutine calls, each one fulfilling a control goal and refining the result produced by the previous one. We propose a design methodology to define a feedback controller structured in accordance with this paradigm and show how a switching policy can be designed that provides stability guarantees for the closed loop system. The cornerstone of this construction is a stochastic model describing the probability of executing, in each activation of the controller, the different subroutines. We show how this model can be constructed for realistic real-time task sets and provide an experimental validation of the approach.

Networked Control - A Modular and Layered Cosimulator for Networked Control Systems
In this paper we present a simulation framework that is intended to be used for a wide class of network control systems. It is designed in order to allow interaction with the Matlab/Simulink environment. The low-level structure is written using the C language so that hardware/network in the loop simulation can be readily done by substituting an arbitrary set of software components with corresponding hardware in an easy way. Sharp modularity of the code structure permits to adapt the simulation to different needs changing only a few modules. We shall show the results of its specialization to a recently proposed controlling approach, demonstrating the flexibility and the accuracy of the simulator. Index Terms—Networked systems, Modelling and simulation, Industrial automation, manufacturing.