Primary tabs
Gabriele Maria Fortunato

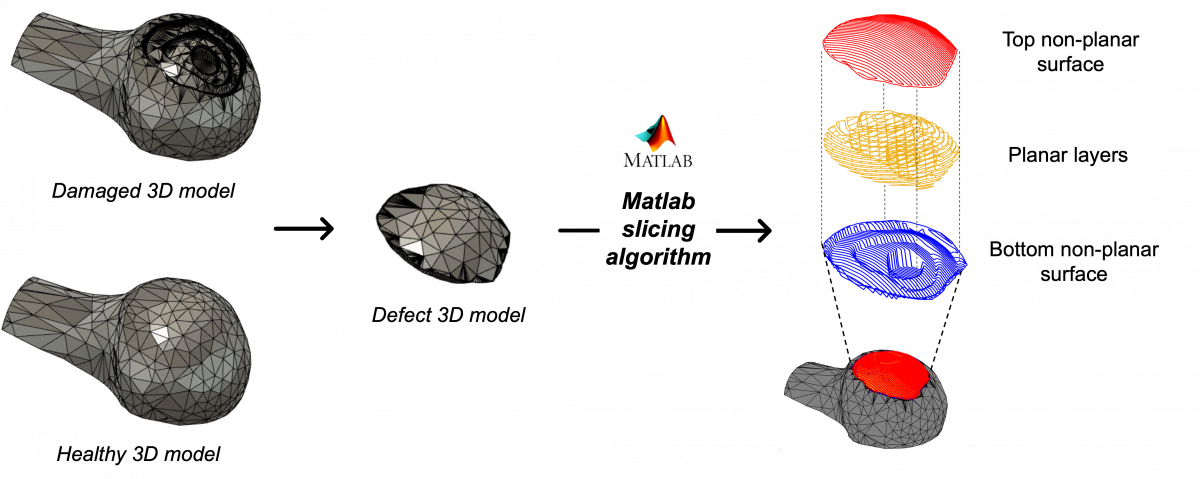
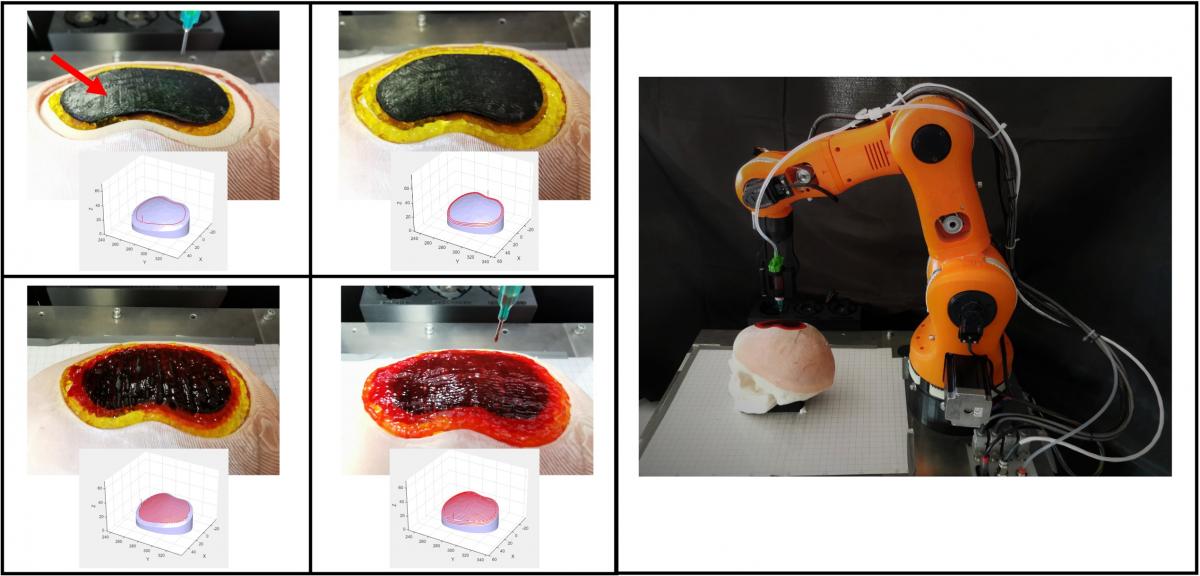
Gabriele Maria Fortunato is an Assistant Professor at the Department of Information Engineering and fellow of the Research Center “E. Piaggio”, University of Pisa. He received his PhD in Information Engineering at the University of Pisa in 2022, working on the development of a robotic biofabrication platform for in situ bioprinting applications. With the aim of investigating the potential and limitations of this promising technology he developed and validated IMAGObot, a 5-axis open-source robotic-arm purposely re-engineered in both hardware and software for in situ bioprinting applications. Considering a standardized operating workflow, four main steps were identified: i) acquisition of the anatomical defect 3D digital model, ii) path planning, iii) path registration in the robot workspace, and iv) in situ bioprinting.
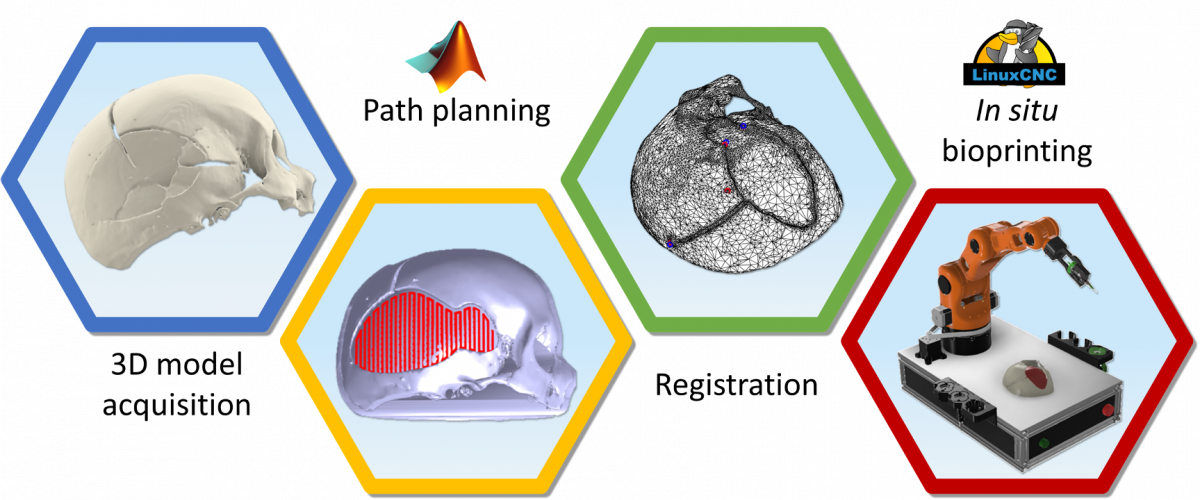
IMAGObot was designed to manage all the previous steps, thanks to the availability of different tools and printheads. The acquisition of the geometry of the anatomical defect is performed using a touch probe, that also allows to evaluate the mechanical properties of the involved biological tissues. Based on the acquired geometry, the printing path is planned using an in-house developed Matlab® algorithm, that is capable of computing non-planar trajectories and slice highly geometrically complex objects. This path is then registered on the patient using anatomical reperii or artificial fiducial markers, always exploiting the available touch probe. The in situ bioprinting step can finally be performed using all the technologies available on the platform (e.g., pneumatic extrusion-based bioprinting, valve-jet bioprinting, inkjet bioprinting). IMAGObot features a fully automatic tool change allowing the use of all these technologies alone or in combination favouring the in situ fabrication of multiscale and multimaterial tissue substitutes.
Considering the need of obtaining highly stable structures in a physiological environment, the path-planning algorithm also enables the management of a purposely developed photo-crosslinking device installed on the pneumatic extruder. The system consists of a support adjustable in height (to modulate the substrate exposure) which allows the direct accommodation of 8 LEDs. To minimise the light exposure of the needle, and avoid its clogging, only the LEDs opposite to the printing direction are switched on to irradiate the newly deposited filament.
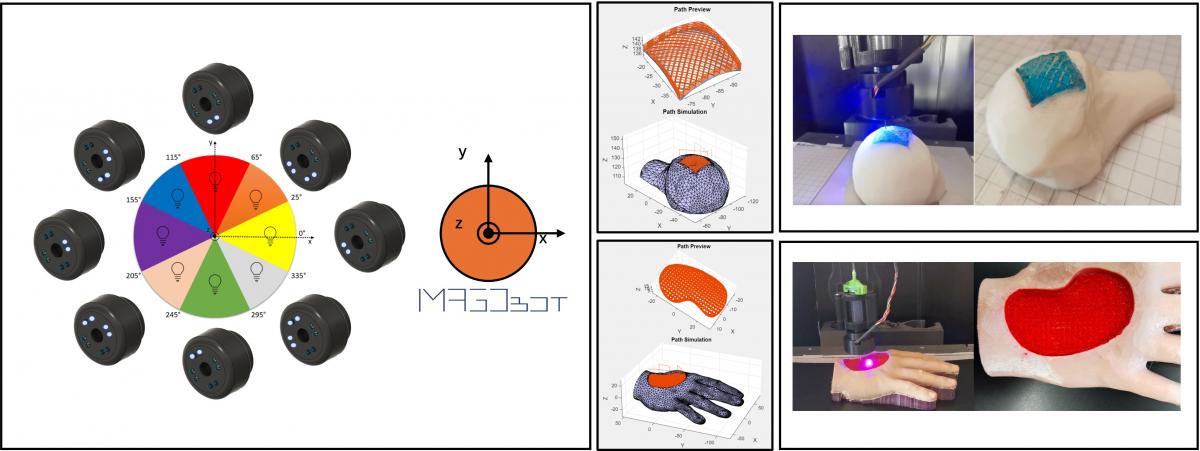
IMAGObot was successfully tested on different anthropomorphic phantoms, highlighting the potential that a robotic platform can have for in situ bioprinting. This approach opens the way to a number of possibilities in the field of tissue engineering, especially for the easiest accessible organs such as skin, bone and cartilage.
All the details about IMAGObot open-source project and a standalone Matlab® app for management of the operating workflow are available at https://github.com/CentroEPiaggio/IMAGObot.
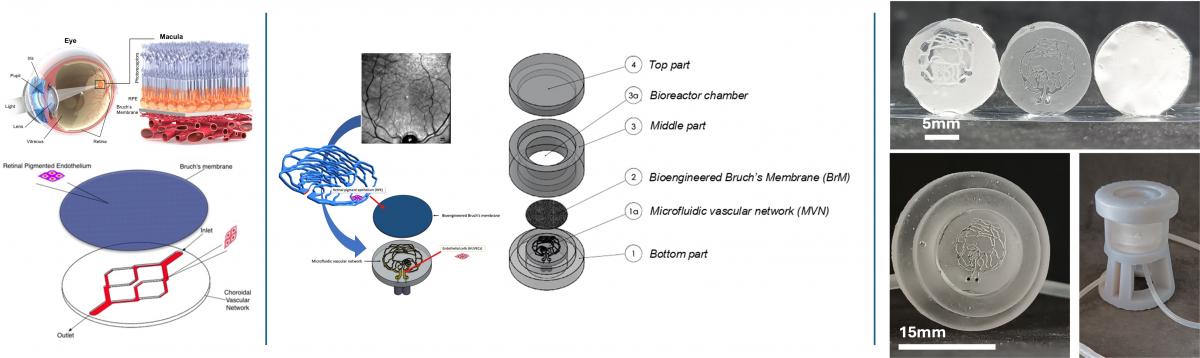
At the present, Fortunato's research activity is also focused on the design of 3D in vitro models in the framework of the PNRR project THE: Tuscany Health Ecosystem - Spoke 4: Nanotechnologies for diagnosis and therapy. More in detail he is working on the design and development of a 3D eye in vitro model resembling both the posterior (Retinal Blood Barrier) and anterior (Corneal stroma) portion of the eye for theragnostic applications. Moreover, his research is also focused on additive manufacturing techniques and their combination (extrusion-based 3D printing, ink-jet printing, electrospinning) to fabricate multiscale and multimaterial scaffolds for tissue engineering applications and he is also involved in the development of open-source medical devices.