
Course
Material
Info
ENGLISH 
DESCRIZIONE DEL CORSO E PROGRAMMA
Il corso integrato comprende due moduli:
1) Meccanica dei Robot (Ing-Ind 13) tenuto dal Prof. M. Gabiccini
2) Controlli Automatici (Ing-Inf 04) tenuto dal Prof. A. Bicchi e dalla Dr.ssa Daniela Selvi
Modulo di CONTROLLI AUTOMATICI
Docente: Antonio Bicchi <[email protected]>
Co-Docenti: Daniela Selvi <[email protected]>
Collaboratori: Davide De Benedittis <[email protected]>
Per ricevere informazioni sul corso (spostamenti di lezioni o appelli e altro) gli studenti sono pregati di registrarsi nel gruppo MS Teams
Il gruppo [email protected] non è più utilizzato per informazioni sul corso. Rimane per comunicazioni di seminari e attività che possono essere di interesse per gli liievi di questo o dei precedenti anni accademici.
MATERIALI DEL CORSO
A. Bicchi - Appunti di Fondamenti di Automatica II Parte
MATERIALE COMPLEMENTARE:
Testi di esame con svogimento per questo corso sono riportati nella sezione "Material" di questa stessa pagina.
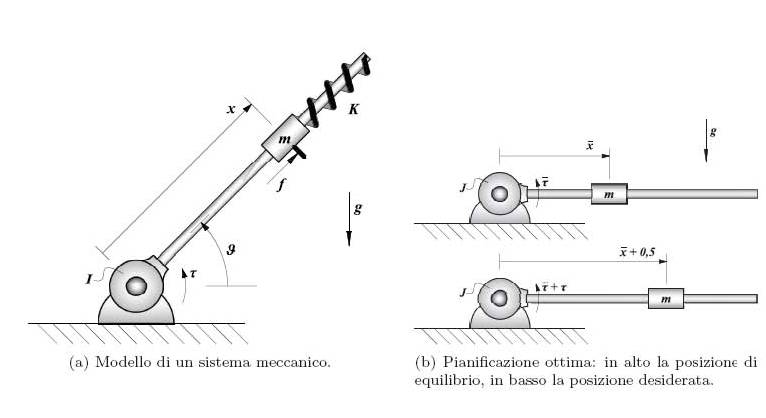
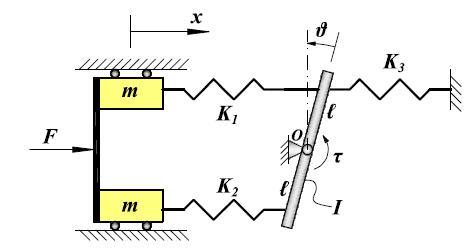
I testi dal 2003 al 2013 forniscono esempi di applicazioni a sistemi meccanici
I testi successivi al 2014 forniscono esercizi utili a verificare le conoscenze teoriche degli allievi
Note sull'uso dei polinomi SOS allo studio della RAS (A Palleschi)
Ricevimenti ed Esami: Martedì pomeriggio. Vedi il Calendario Didattico del corso
APPELLI E MODALITA' DI ESAME
L'esame consiste della valutazione di un elaborato scritto e di una prova orale. E' necessario iscriversi mediante il sistema https://esami.unipi.it/backoffice/.
L'esame si svolge dietro appuntamento diretto con il docente del corso e il co-docente. Gli esami sono pubblici e disponibili sul calendario didattico dei docenti.
Tutte le comunicazioni riguardanti l'esame devono essere inviate sia al docente che ai co-docenti del corso.
La prova d'esame consiste nella verifica della conoscenza del programma e della capacità operativa dello studente di applicare gli strumenti appresi a casi realistici di sistemi automatici e robotici.
Nella prima parte della prova, allo studente è data la possibilità di illustrare, nei modi da lui preferiti, cosa ha imparato dal corso e come è stato in grado di applicarne gli insegnamenti a casi di studio realistici e impegnativi. Per raggiungere questo scopo, il candidato può presentare uno o più esercitazi svolti in cui svolge nel dettaglio esempi applicativi degli argomenti del corso. Le soluzioni presentate possono essere ottenute con l'ausilio di strumenti informatici e dimostrate con simulazioni. Le esercitazioni possono essere presentate anche come verifiche in itinere durante lo svolgimento del corso, in relazioni alle parti di programma via via coperte - questa modalità è anzi incoraggiata.
In sede d'esame, il candidato potrà illustrare il proprio lavoro con una presentazione orale. Il testo degli elaborati e della presentazione (inclusi i file sorgente delle parti numeriche) deve essere messo a disposizione di tutti i docenti e dei tutori che hanno seguito la preparazione del candidato almeno una settimana prima della data dell'appello orale, inviando una email contenente il link da cui scaricare il materiale, in modo da poter verificare i risultati in anticipo. La presentazione orale sarà di conseguenza limitata ad una durata di dieci minuti, seguita da discussione e domande eventuali.
Le conoscenze e abilità applicative non illustrate dal lavoro presentato autonomamente dallo studente saranno verificate direttamente nella seduta orale d'esame.
Lo studente dovrà in tal caso non solo rispondere a domande sulla teoria, ma anche dimostrare le capacità operative per risolvere problemi applicativi.
Per la ricerca di argomenti da proporre come tavole, si suggerisce di partire da macchine o altri sistemi dinamici già esistenti nella realtà pratica, analizzando in dettaglio quali problemi di controllo vi siano nella pratica, o quali miglioramenti si potrebbero attuare con soluzioni di questa natura, e procedendo in seguito a costruirne un modello matematico. Il percorso inverso non è consigliato. La scelta dell'argomento dell'approfondimento è responsabilità dell'allievo, che può così dimostrare di aver appreso la valenza applicativa dei metodi studiati. Si noti che nelle slide della presentazione si deve fare esplicito riferimento alle fonti utilizzate per ricavare i modelli, i dati e le specifiche del progetto.
Gli elementi di valutazione degli elaborati, oltre ovviamente alla correttezza dello svolgimento, sono i seguenti:
1) Realismo applicativo del problema proposto, che deve rappresentare una macchina, un impianto o un qualsiasi sistema dinamico di cui si deve descrivere il contesto applicativo, sulla base del quale sono dettate ragionevoli specifiche di funzionamento;
2) Originalità del tema. Sono escluse ripetizioni di argomenti già trattati da altri studenti, a meno che non si introducano variazioni tali da rendere la soluzione del problema suficientemente diversa ed interessante
3) Ricchezza dei temi affrontati e degli strumenti utilizzati rispetto al programma del corso
4) Esaustività e coerenza della trattazione.
Il programma del modulo di Controlli Automatici è costituito dalle seguenti parti principali, sulle quali gli studenti devono dimostrare conoscenza e capacità operative di applicazione:
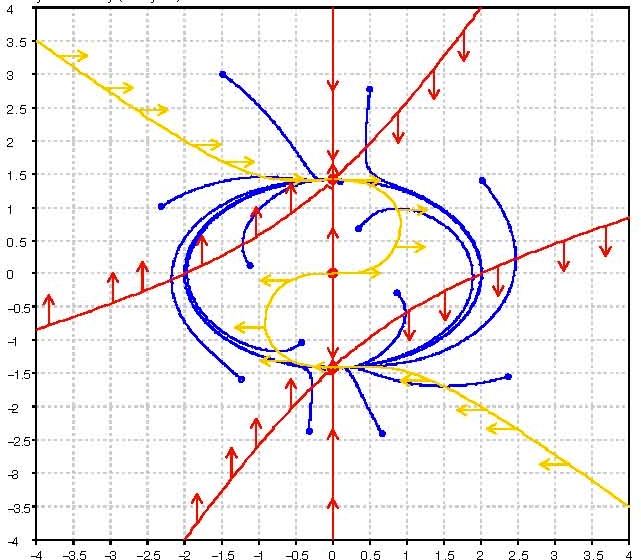
1) Stabilità: Strumenti di analisi e di progettazione di controllori per sistemi nonlineari; valutazione quantitativa della regione di asintotica stabilità
2) Analisi delle proprietà strutturali e costruzione di regolatori lineari, realizzazione e simulazione di schemi di controllo per soddisfare specifiche assegnate
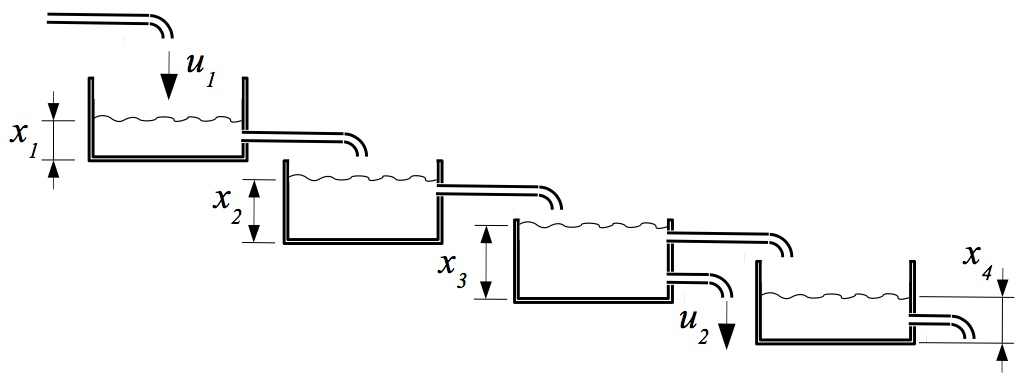
3) Pianificazione ottima in presenza di limiti sui controlli e vincoli sugli stati. Applicazione di schemi di controllo in feedforward e feedback, verifica dei vincoli e dei costi del controllo.
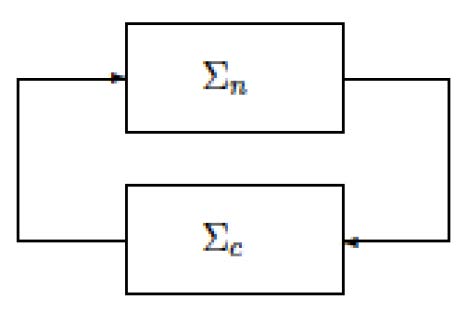
I sistemi di cui nel corso si vedono applicazioni di queste tecniche sono principalmente di due tipi:
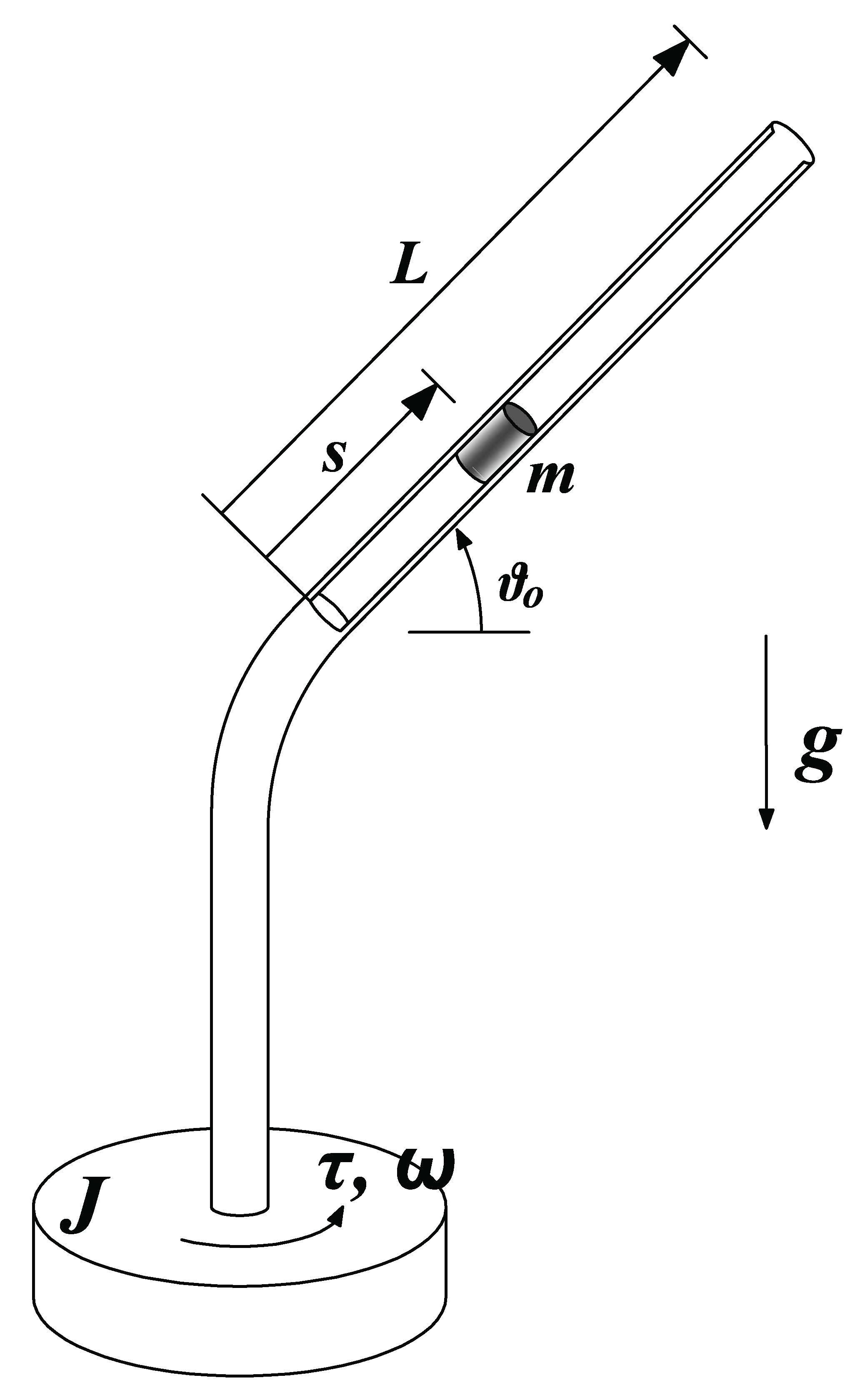
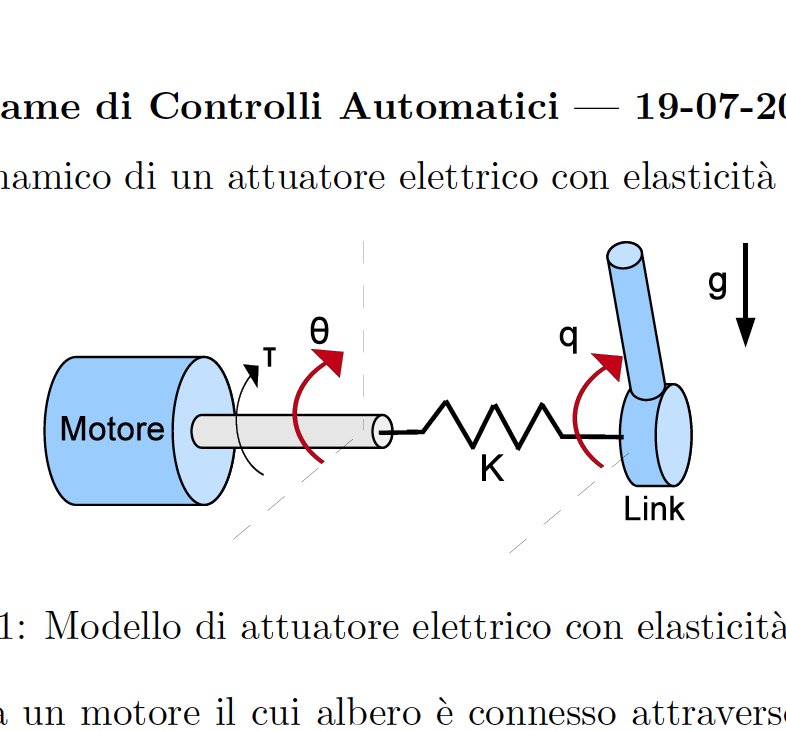
A) Sistemi robotici articolati: Controlo cinematico e dinamico di sistemi completamente attuati. Controllo adattivo di sistemi incerti
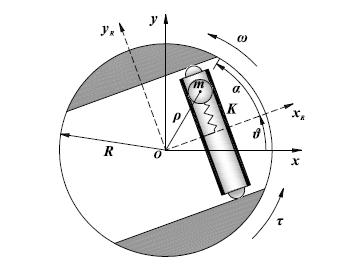
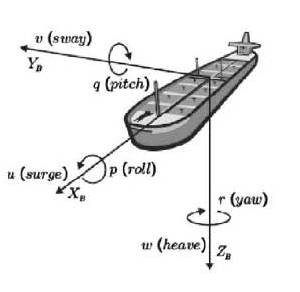
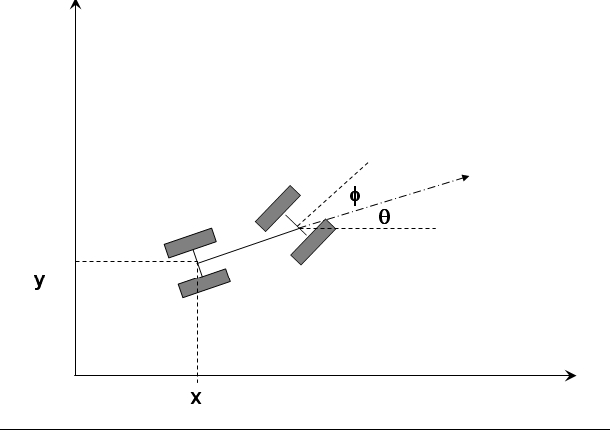
B) Veicoli: Controlo cinematico e dinamico di veicoli di diversa natura su posture, tracce e movimenti.
PROGETTI E TESI DI LAUREA
Agli studenti particolarmente interessati può essere data la possibilità di svolgere una più approfondita attività applicativa, o "progetto" che tipicamente comprende lo sviluppo o l'utilizzo di sistemi fisici (hardware) controllati in tempo reale, e/o l'introduzione e lo studio di strumenti non strettamente ricompresi nel programma illustrato a lezione. Il progetto può coinvolgere anche aspetti multidisciplinari e mettere a frutto uno spettro più ampio di competenze del candidato. Per ricevere informazioni sugli argomenti di approfondimento applicativo per il corso, e per eventuali sviluppi in Tesi di Laurea Magistrale, potete rivolgervi ai membri del Gruppo di Robotica.
Per facilitarci, siete pregati di compilare questo questionario e di mandare una email al docente di riferimento.
LABORATORI
Le parti sperimentali del lavoro di progetto o tesi potranno svolgersi in uno dei laboratori a disposzione del gruppo:
1) Laboratorio di Robotica I - Centro di Ricerca E. Piaggio, Largo Lazzarino 1, Pisa
2) Laboratorio di Robotica II - Centro di Ricerca E. Piaggio, Polo Tecnologico di Navacchio, Pisa
3) Advanced Manufacturing Lab, DII CrossLab, Polo Tecnologico di Navacchio, Pisa
3) Laboratorio Soft Robots for Human Cooperation and Rehabilitation, IIT, Genova
4) JOIINT Lab Intellimech-IIT, c/o Km Rosso, Stezzano, Bergamo
Material
2019
2018
2017
2016
2015
2014
2013

2012
2011
2010
2009
2008
2007

2006
2005
2004
2003
Information
Exam info:
Collaboratori al Corso: Prof. Lucia Pallottino, Ing. Hamal Marino, Ing. Alessandro Settimi, Ing. Manolo Garabini, Ing. Giorgio Grioli